题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
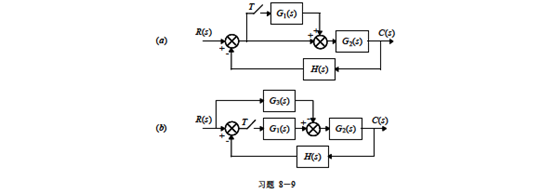
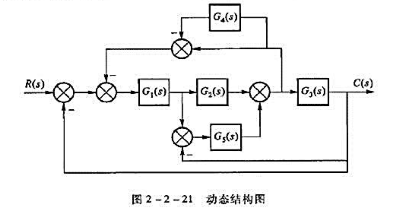
已知系统结构图如下图所示。 (1)求传递函数C(s)/R(s),C(s)/N(s)。 (2)若要消除干扰对输出的影响,即C(s)/N(s
已知系统结构图如下图所示。
(1)求传递函数C(s)/R(s),C(s)/N(s)。
(2)若要消除干扰对输出的影响,即C(s)/N(s)=0,G0(s)=?
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
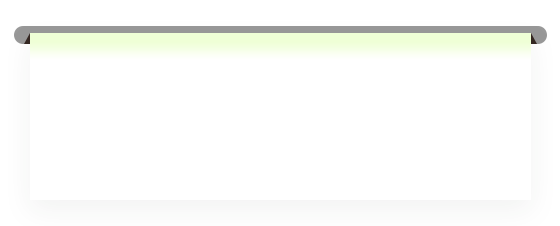
已知系统结构图如下图所示。
(1)求传递函数C(s)/R(s),C(s)/N(s)。
(2)若要消除干扰对输出的影响,即C(s)/N(s)=0,G0(s)=?
答案
 更多“已知系统结构图如下图所示。 (1)求传递函数C(s)/R(s),C(s)/N(s)。 (2)若要消除干扰对输出的影响,即C(s)/N(s”相关的问题
更多“已知系统结构图如下图所示。 (1)求传递函数C(s)/R(s),C(s)/N(s)。 (2)若要消除干扰对输出的影响,即C(s)/N(s”相关的问题
第2题
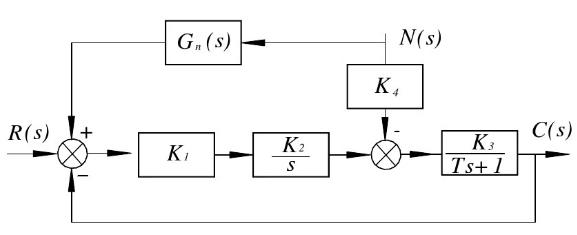
已知系统结构图如图3-9所示:
(1)欲使系统闭环极点配置在-3+j4, -3-j4处,试求K1和K2的值;
(2)设计G(s),使阶跃作用u(t)下稳态误差为零。
第5题
如下图所示为一附合水准路线等外水准测量成果示意图,BMA、BMB为已知水准点,其高程分别为HA=49.700m,HB=46.**0m,**代表你学号的末2位(例如,你学号末2位为23,则HB=46.230m),各测段的高差(m)和路线长度(km)分别标注在路线的上方和下方,求待测点1、2、3的高程(精确到mm)。 点号 距离(km) 高差(m) 改正数(mm) 改正后高差(m) 高程(m) BMA 49.700 1 2 3 BMB Σ 辅助计算:
点号 距离(km) 高差(m) 改正数(mm) 改正后高差(m) 高程(m) BMA 49.700 1 2 3 BMB Σ 辅助计算:
第6题
无耗长线特性阻抗为500Ω,如下图所示。负载阻抗ZL=100-j100Ω,通过四分之一波长变换段及并联短路分支线使长线输入端实现匹配。已知信号频率为300MHz,求变换段特性阻抗

第8题
下图所示的减速装置中,齿轮1联于电动机的轴上。已知各轮的齿数为z1=z2=20,z3=60,z4=90,z5=210;又电动机的转速为n电=1440r/min。求轴B的转速nB及其回转方向。