题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
可使机器人绕着工具TCP点作姿态调整的运动方式是()。
A.单轴运动
B.线性运动
C.重定位运动
D.绝对位置运动
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
A.单轴运动
B.线性运动
C.重定位运动
D.绝对位置运动
答案
 更多“可使机器人绕着工具TCP点作姿态调整的运动方式是()。”相关的问题
更多“可使机器人绕着工具TCP点作姿态调整的运动方式是()。”相关的问题
第6题
第8题
A.256
B.1024
C.512
D.1400
第10题
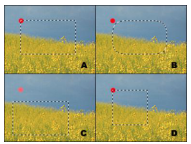
A.如B图,调整羽化半径
B.如B图,调整选区的圆角大小
C.如C图,移动整体位置
D.如D图,约束选区比例,绘制正方形选区
E.没有变化