题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知R(a1,a2,a3)=2,R(a2,a3,a4)=3,证明:(1)a1能由a2,a3
已知R(a1,a2,a3)=2,R(a2,a3,a4)=3,证明:(1)a1能由a2,a3
已知R(a1,a2,a3)=2,R(a2,a3,a4)=3,证明:
(1)a1能由a2,a3线性表示;
(2)a4不能由a1,a2,a3线性表示。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
已知R(a1,a2,a3)=2,R(a2,a3,a4)=3,证明:
(1)a1能由a2,a3线性表示;
(2)a4不能由a1,a2,a3线性表示。
答案
 更多“已知R(a1,a2,a3)=2,R(a2,a3,a4)=3,证明:(1)a1能由a2,a3”相关的问题
更多“已知R(a1,a2,a3)=2,R(a2,a3,a4)=3,证明:(1)a1能由a2,a3”相关的问题
第1题
现有某个应用,涉及到两个实体集,相关的属性为:
实体集R(A#,A1,A2,A3),其中A#为码
实体集S(B#,B1,B2),其中B#为码
从实体集R到S存在多对一的联系,联系属性是D1。
(1)设计相应的关系数据模型;
(2)如果将上述应用的数据库设计为一个关系模式,如下:
RS(A#,A1,A2,A3,B#,B1,B2,D1),指出该关系模式的码。
(3)假设上述关系模式RS上的全部函数依赖为:A1→A3,指出上述模式RS最高满足第几范式?(在1NF~BCNF之内)为什么?
第2题
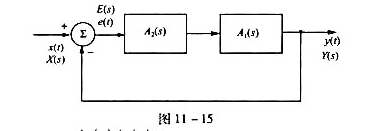
定,并使误差信号e(t)=x(t)-y(t)随时间增长而衰减到零.
(1)若 a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值
a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值 .(借助拉氏变换的终值定理.)
.(借助拉氏变换的终值定理.)
(2)若A1(s)仍如(1)问,而A2(s)改为比例积分(PI)控制 .为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
.为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
(3)若 试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时
试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时 可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
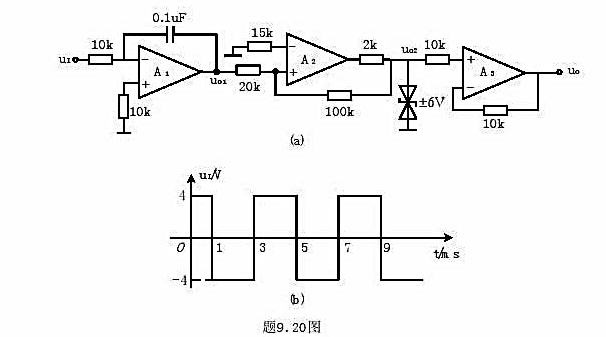
第3题
题9.20图(a)所示电路中,输入电压ur的波形如图(b)所示,已知电容的初始电压为零。(1)指出A1、A2、A3各组成何种电路;(2)画出各输出电压u01、u02和u0的波形,标出有关电压值。
第6题
第7题
设 和+,表示模j加法。
和+,表示模j加法。
(a)证明A2×A2同构于A1。
(b)描述A2×A3上同余关系的集合。
(c)描述Am上同余关系集合,这里m∈I+.
第10题
求环路的同步带。若R=3.6kΩ,C=0.3pF,试求环路的快捕带。

第11题
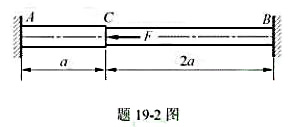
图示两端固定杆AB,截面C承受轴向载荷F作用。已知AC与CB段的横截面面积分别为A1=200mm2,A2=150mm2,屈服应力σs=300MPa。试确定极限载荷Fu。